
I am a Postdoc researcher at MIT CSAIL, working with Prof. Pulkit Agrawal and Prof. Edward Adelson. I earned my PhD degree from Shanghai Jiao Tong University, where I worked with Prof. Cewu Lu. My research focuses on General Robotic Manipulation.
I will join the University of Maryland, College Park (UMD) as an Assistant Professor of Computer Science. I will be hiring motivated students at multiple levels and postdocs, working on dexterous manipulation, sensorizing humans for robotic data, vision-tactile learning, hardware-data-learning co-design, etc. If you are interested in working with me, please contact me via email. Besides CS, students with ME and EE backgrounds are also highly welcomed!
News
- 2025-05: DEXOP won the Best Paper Award in RSS 2025 dexterous manipulation workshop!
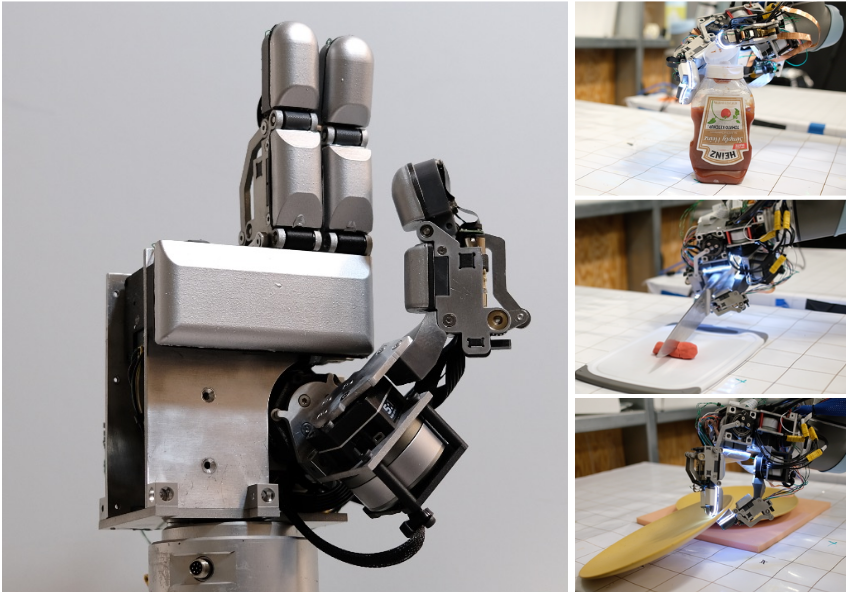
- 2024-10: EyeSight Hand paper was selected as a Best RoboCup Paper Finalist at IROS 2024!
- 2024-09: One paper accepted to RA-L.
- 2024-06: Two papers accepted to IROS.
- 2024-05: Our RT-X paper won the Best Paper Award at ICRA 2024!
- 2024-01: Four papers accepted to ICRA.
- 2023-10: AnyGrasp won the Best Paper Award in IROS 2023 workshop “Learning Meets Model-based Methods for Manipulation and Grasping”!
- 2023-07: GraspNet-1Billion accepted to IJRR.
- 2023-06: One paper accepted to IROS.
- 2023-05: AnyGrasp accepted to T-RO.
- 2022-11: AlphaPose accpeted to T-PAMI.
- 2022-03: One paper accepted to Nature.
- 2021-06: Awarded the ByteDance Fellowship. Thanks ByteDance!
- 2020-11: Awarded the Microsoft Research Asia Fellowship. Thanks Microsoft!
- 2019-12: Awarded the Baidu Fellowship. Thanks Baidu!
Selected Publications


For the full publication list please refer to my Google Scholar page.
Projects
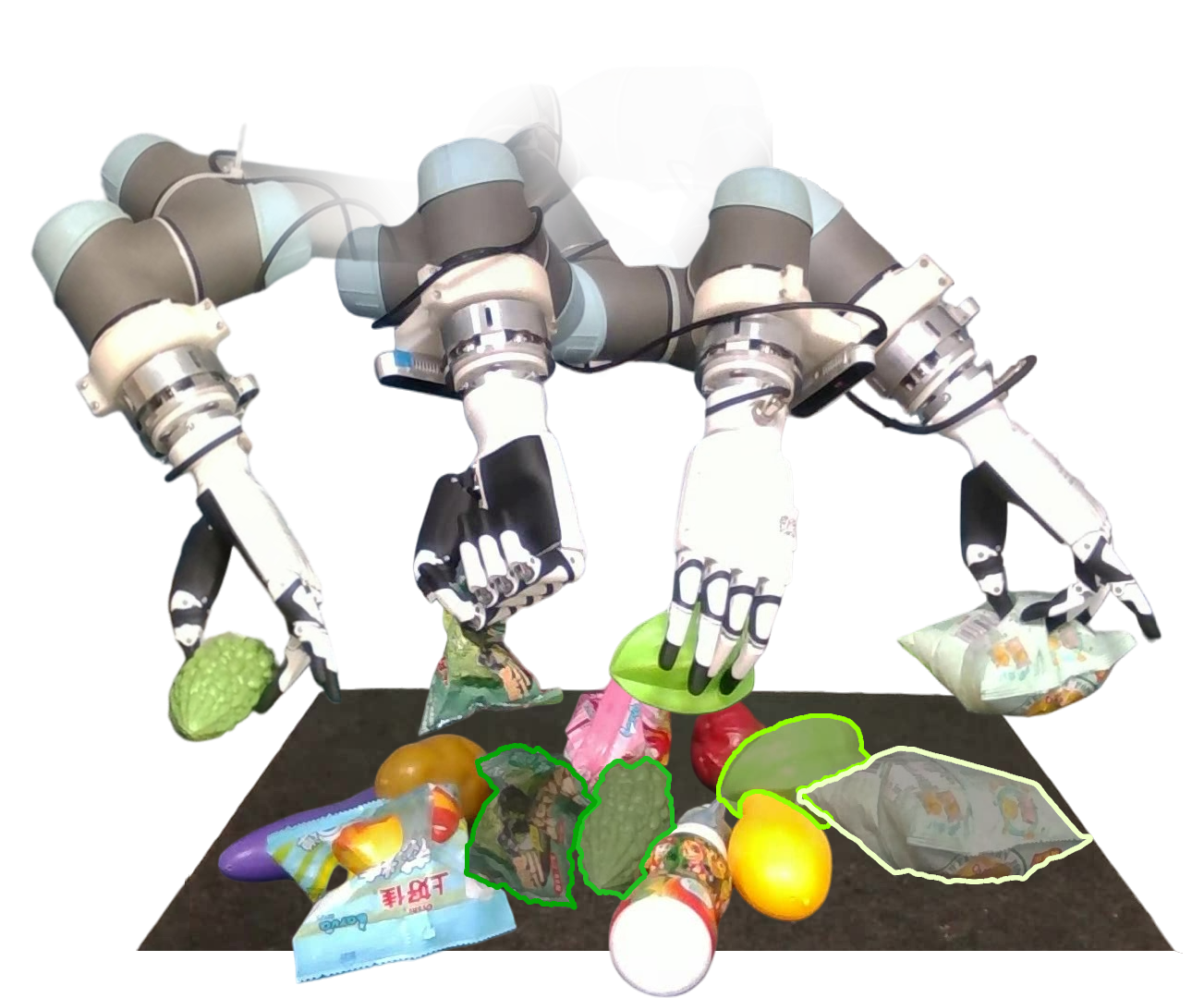
GraspNet
General object grasping for any scenario

AlphaPose
Accurate multi-pereson pose estimation
Teaching
- Lecturer, 6.S186 Modern Robot Learning: Hands-on Tutorial, MIT, 2025
- Teaching Assistant, AI 1602 Introduction to Artificial Intelligence, SJTU, 2022
- Guest Lecturer, CS 386 Digital Image Processing, SJTU, 2020
- Teaching Assistant, AI 1602 Introduction to Artificial Intelligence, SJTU, 2020
Recent Invited Talks
- [2025/10] ICCV26, Recovering Object 6D Pose Workshop, Unlocking Robotic Dexterity: Sensorizing Human Manipulation for Robotic Transfer
- [2025/10] Humanoid, Dexterous Humanoid Manipulation Workshop, Perioperation: Sensorizing Human Manipulation for Dexterous Humanoid Manipulation [recording]
- [2025/04] Princeton University CS Seminar, Science of Data for Human-Level Robotic Manipulation
- [2025/03] Columbia University EE Seminar, Maryland University, Boston University, Data Science for Human-level Robotic Manipulation
- [2025/02] University of Wisconsin-Madison, Dartmouth College, Data Science for Human-level Robotic Manipulation
- [2024/12] Cornell University, Guest Lecture on Robot Learning
- [2024/10] ICML Workshop Panelist, Challenges and Opportunities in Multimodal Foundation Models
- [2024/04] Massachusetts Institute of Technology, Improving Data Efficiency and Accessibility for General Robotic Manipulation
Public Services
- Associate Editor for IROS 2025
- Co-chair for the IROS 2024 RoboCup Presentation session.
- Organizer for the ICML 2024 MFM-EAI Workshop.
- Reviewer for IJRR, T-RO, T-PAMI, IJCV, TMM, TOC, TIP, ICRA, IROS, ICLR, CVPR, ICCV, ECCV, AAAI, etc.